(c) pdf-ка с описанием (en)
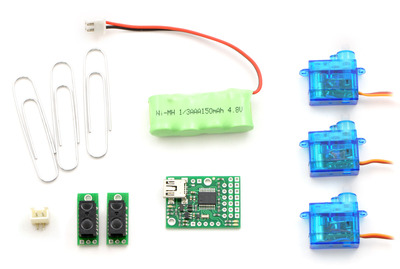
Робот имеет маленький размер, может передвигаться вперед и назад, поворачиваться налево и направо, а также имеет инфракрасные датчики для того, чтобы избегать препятствия.
принцип передвижения схож с , что и не удивительно, т.к. тут так же используется 3 :)
такого робота-насекомого.
Робот имеет маленький размер, может передвигаться вперед и назад, поворачиваться налево и направо, а также имеет инфракрасные датчики для того, чтобы избегать препятствия.
принцип передвижения схож с , что и не удивительно, т.к. тут так же используется 3 :)
такого робота-насекомого.