(c)
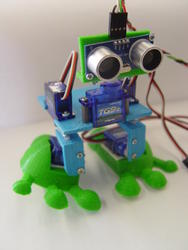
В основе робота:
— Nano
— 5 штучек (по две сервы на ногу и одна на «шею»)
— УЗ-сенсор
— Mini
— пластиковые части (ноги, кронштейны, платформа)
демонстрационное видео — Arduped:
http://vimeo.com/38867140
А вот очередной четырёхног, но уже на Arduino UNO
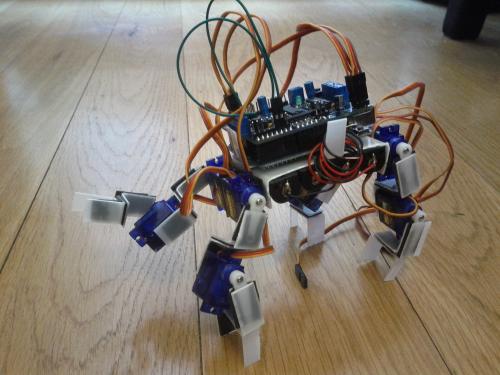
— используются те же (так же, по две сервы на ногу)
Ссылки:
По теме:
В основе робота:
— Nano
— 5 штучек (по две сервы на ногу и одна на «шею»)
— УЗ-сенсор
— Mini
— пластиковые части (ноги, кронштейны, платформа)
демонстрационное видео — Arduped:
http://vimeo.com/38867140
А вот очередной четырёхног, но уже на Arduino UNO
— используются те же (так же, по две сервы на ногу)
Ссылки:
По теме:
Комментариев нет:
Отправить комментарий